Wykonał: mgr inż. Kamil Bobrowski
Kierunek studiów: Automatyka i Robotyka
Specjalność: Modelowanie komputerowe układów i procesów (AB3)
Promotor: dr hab. inż. Witold Beluch prof. PŚ
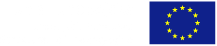
Celem pracy magisterskiej było zaprojektowanie, wykonanie oraz zaprogramowanie mobilnej platformy do kontroli bezpieczeństwa w pomieszczeniach. Zdecydowano się na stabilna konstrukcję, która posiada łącznie sześć punktów podparcia, przy czym podczas chodzenia są to zawsze minimum trzy punkty. Do realizacji zadania użyto środowiska komputerowego Autodesk Inventor. Elementy nośne całej konstrukcji zostały wykonane z PLA za pomocą technologii druku 3D. System poruszania platformą został zaimplementowany na płytce Arduino Uno. Do płytki został dodany sterownik serwomechanizmów z komunikacją I2C. Zbieranie danych z otoczenia (kamera oraz czujniki: temperatury, wilgotności, gazu) i wizualizacja otrzymanych informacji zostały zrealizowane z wykorzystaniem platformy komputerowej Raspberry Pi 3B+. Zaprojektowano intuicyjny w użyciu interfejs strony internetowej do obsługi platformy z wykorzystaniem urządzenia mobilnego, np. smartfonu lub tabletu.
Wykonał: mgr inż. Szymon Bury
Kierunek studiów: Mechaniki i Budowa Maszyn
Specjalność: Modelowanie i Optymalizacja Układów Mechanicznych (studia dualne)
Promotor: dr hab. inż. Adam Długosz prof. PŚ
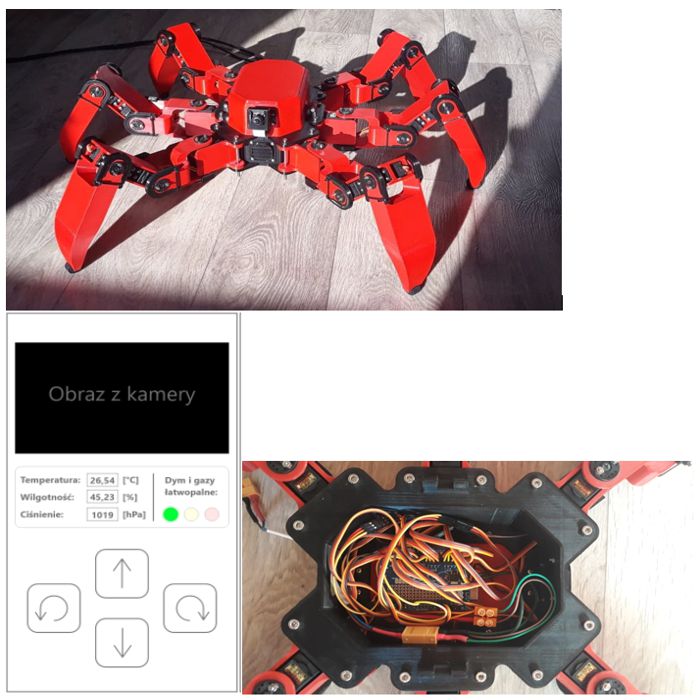
W pracy zastosowano model teoretyczny oraz numeryczny efektu Joule’a-Lenza do
zaprojektowania i rozwiązania zagadnienia pasywnego zabezpieczenia prądowego.
Wykonano sprzężone analizy elektro-termiczne w systemie Ansys Workbench dla różnych wariantów
warunków brzegowych. Uzyskane rozwiązania w postaci ciepła Joule’a oraz wartości temperatur zostały porównane
z rozwiązaniem otrzymanym za pomocą wzorów analitycznych. Dla wszystkich wariantów
analiz uzyskano wysoką zgodność rozwiązań. Ponadto w ramach pracy przeprowadzono rzeczywistą próbę zadziałania zabezpieczenia przeciwprądowego.
Wykonał: mgr inż. Wiktor Klimek
Kierunek studiów: Mechaniki i Budowa Maszyn
Specjalność: Mechanika Komputerowa (MB4)
Promotor: dr hab. inż. Adam Długosz
Praca dotyczyła zagadnień numerycznego modelowania materiałów kompozytowych oraz wybranych badań doświadczalnych dla tego typu materiałów. W pracy zawarto teoretyczny opis podstawowych informacji o materiałach kompozytowych oraz metodach ich wytwarzania. Do analiz numerycznych zastosowano metodę elementów skończonych w postaci pakietów oprogramowania Ansys oraz MSC.Patran/Nastran. Do modelowania wykorzystano moduły dedykowane dla materiałów kompozytowych. Na podstawie przeprowadzonych analiz numerycznych, przeprowadzono gruntownie porównanie własności wytrzymałościowych dla laminatów wzmacnianych włóknami węglowymi w zależności od ich parametrów (m.in. kątów ułożenia warstw włókna, ich grubości). Ponadto w pracy przeprowadzono statyczne próby rozciągani próbek wykonanych z laminatów wzmacnianych włóknami węglowymi.
Ciekawym i wartościowym elementem pracy było również badanie sztywności fragmentu skrzydła samolotu bezzałogowego. Przeprowadzono zarówno badanie doświadczalne jaki i analizę numeryczną tego komponentu. Sprawdzono kryterium zniszczenia badanego fragmentu konstrukcji wykorzystując kryterium Tsai-Hilla. Do tego celu utworzono odpowiednie skrypty w oprogramowaniu Matlab, które zostały połączone z systemem Patran/Nastran.

Wykonał: mgr inż. Jacek Witek
Kierunek studiów: Mechatronika
Specjalność: Modelowanie i Symulacja Systemów Mechatronicznych (ME3)
Promotor: dr hab. inż. Wacław Kuś Prof. PŚ
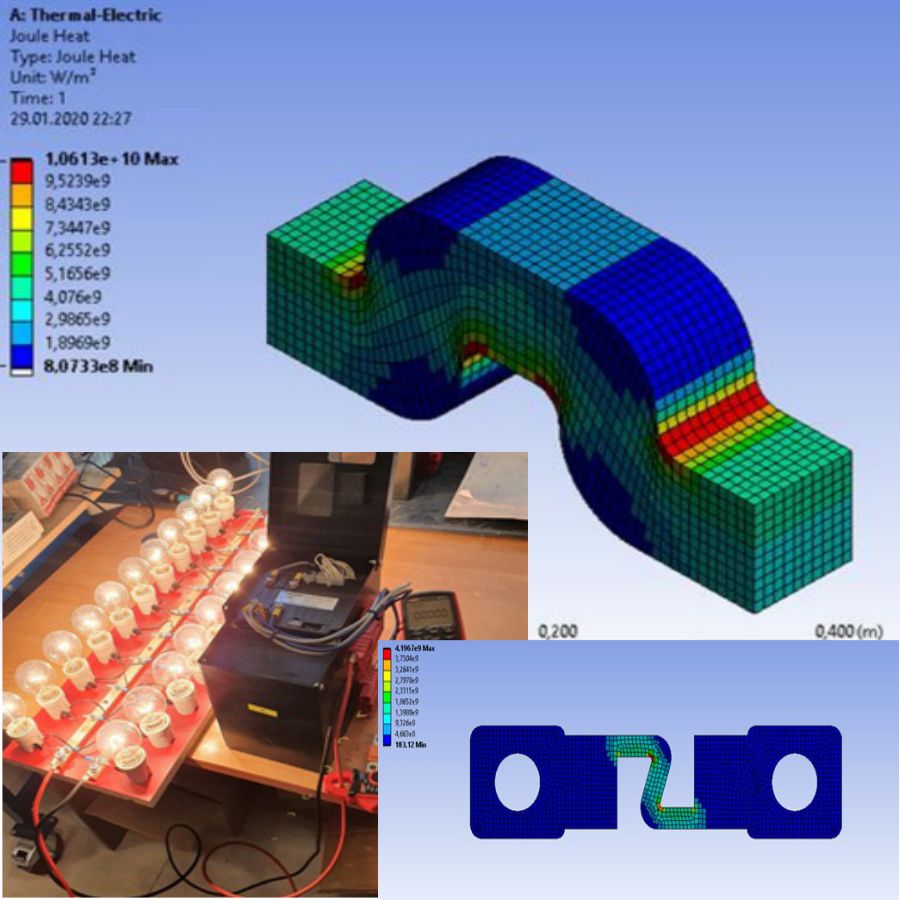
W ramach pracy zaprojektowano i utworzono układ mechatroniczny w postaci prototypu platformy Stewarta (minaturowego symulatora lotu). Opracowano koncepcję oraz wykonano układy elektroniczne (Phidgets Inc.) pozwalające na sterowanie platformą, oraz wykonano model rzeczywisty. Sterowanie platformy odbywa się poprzez wykonywanie się w czasie rzeczywistym programu sterującego napisanego w języku C++. Ponadto Przeprowadzono symulacje numeryczne dla zbudowanego układu (Ansys Workbench 14.5) oraz stworzono aplikacje HIL (ang. Hardware in the loop) w celu weryfikacji wyników symulacji numerycznej. Prototyp miniaturowego symulatora lotu został zaprezentowany podczas wydarzenia akademickiego Noc Naukowców 2013. Praca została zaprezentowana na studenckiej konferencji naukowej Metody Komputerowe 2014.
Wykonał: mgr inż. Kamil Sajdak
Kierunek studiów: Automatyka i Robotyka
Specjalność: Modelowanie Komputerowe Układów i Procesów (AB3)
Promotor: Prof. dr hab. inż. Ewa Majchrzak
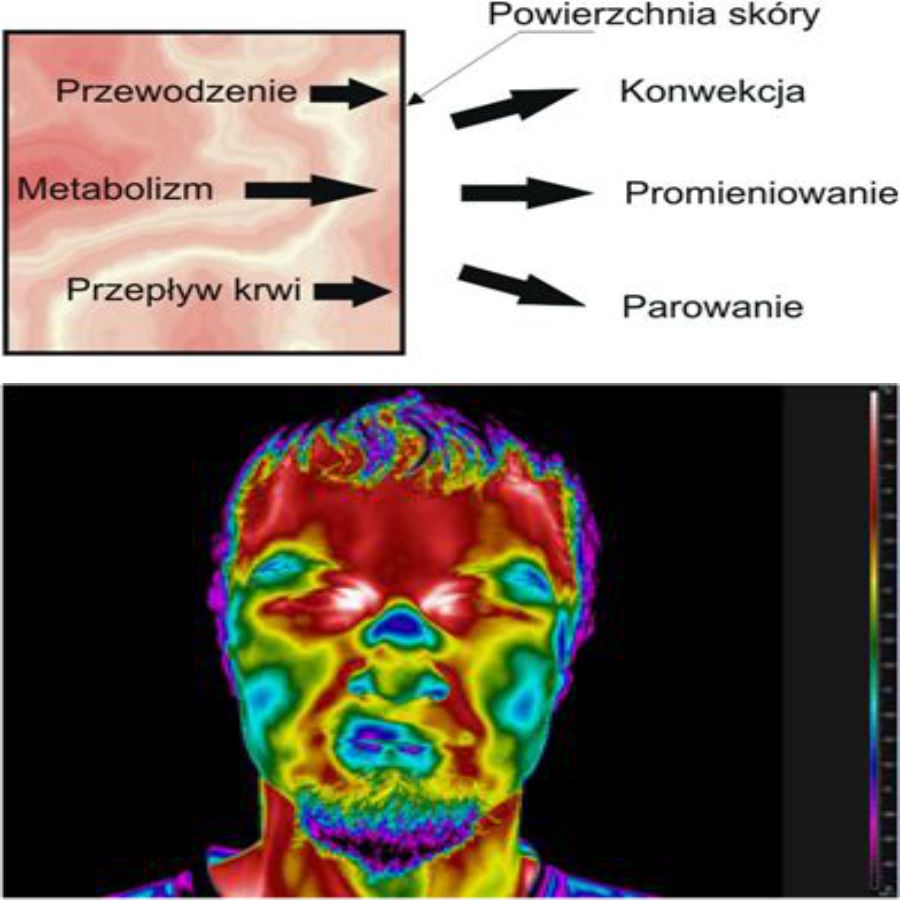
W pracy przedstawiono udaną próbę eksperymentalnego zweryfikowania możliwości przekształcania danych temperaturowych w dane perfuzyjne. Opracowany model matematyczny otrzymano na podstawie założenia, że suma strumieni ciepła odprowadzanych z wnętrza organizmu do powierzchni skóry jest równa sumie strumieni płynących z powierzchni skóry do otoczenia. Na rysunku 1 przedstawiono schemat wymiany cieplnej w organizmie człowieka. Na rysunku 2 a) przedstawiono termogram twarzy. Kolory reprezentujące temperaturę zmieniają się od czarnego dla temperatury niższej od 30oC do koloru białego dla 35⁰C. Na rysunku 2 b) przedstawiono rozkład perfuzji krwi. Największa wartość występuje w okolicy oczu i wynosi 0.0045 kg/( m2s).
Wykonał: mgr inż. Tomasz Marczewski
Kierunek studiów: Automatyka i Robotyka
Specjalność: Modelowanie Komputerowe Układów i Procesów (AB3)
Promotor: dr hab. inż. Mirosław Szczepanik
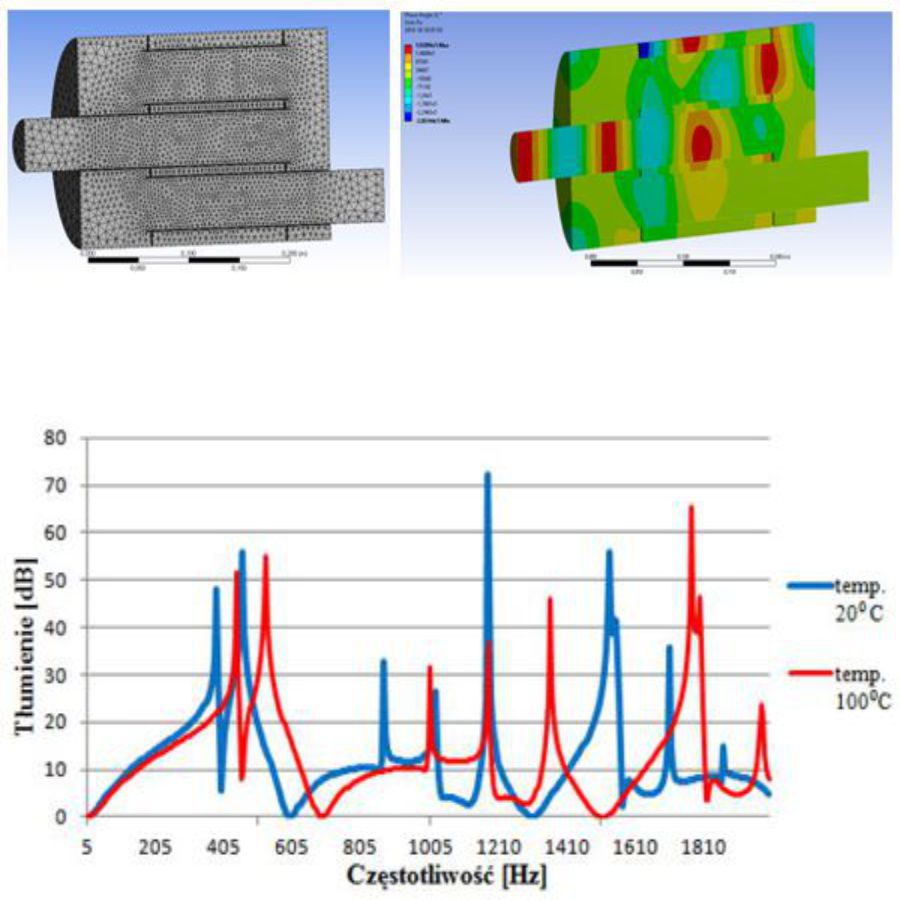
Celem pracy było przeprowadzenie analiz akustycznych tłumików samochodowych o różnych postaciach konstrukcyjnych z wykorzystaniem programu Ansys. Autor pracy skupił swą uwagę na grupie tłumików rezonansowych. Zasada działania tłumika rezonansowego polega na wielokrotnym odbijaniu poruszającej się wraz ze spalinami fali dźwiękowej.
Zmiana przekroju powoduje odbicie fali, a perforacje wykonane w rurach wlotowej jak i wylotowej pomagają w rozchodzeniu się fali w różnych kierunkach. Autor przedstawił w pracy wiele analiz dla różnych postaci konstrukcyjnych tłumika rezonansowego. Poniżej przedstawiono: schemat cyrkulacji powietrza w tłumiku, model geometryczny, wizualizację rozkładu ciśnienia dla częstotliwości 1530 Hz oraz zależność efektywności tłumienia od częstotliwości w temperaturze powietrza 20⁰C i 100⁰C dla tłumika o trzech komorach rezonansowych z perforacjami.
Wykonał: mgr inż. Rafał Zimnowodzki
Kierunek studiów: Mechanika i Budowa Maszyn
Specjalność: Mechanika Komputerowa (MB4)
Promotor: dr hab. inż. Adam Długosz
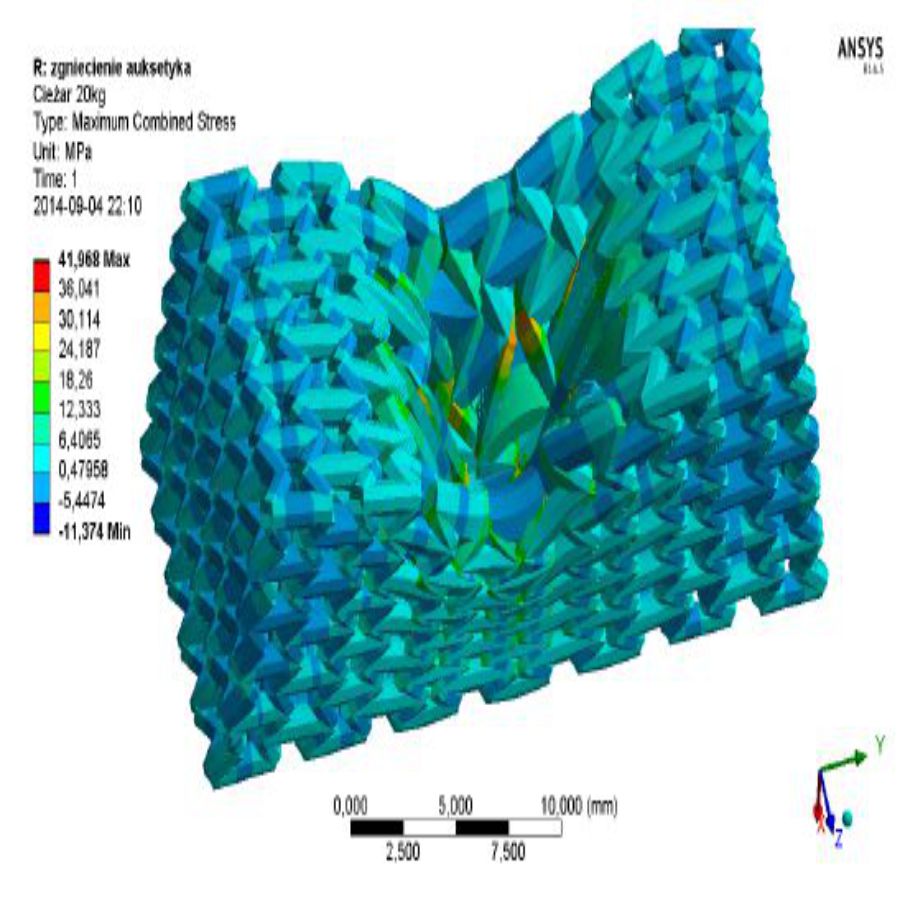
Praca dotyczyła analizy numerycznej materiałów auksetycznych, tj. materiałów posiadających ujemny współczynnik Poissona. Do utworzenia modeli geometrycznych autor pracy wykorzystał systemy CAD – Inventor oraz Design Modeller systemu Ansys. Analizy numeryczne wykonano przy użyciu systemu Ansys. Autor przygotował oraz przeprowadził analizę numeryczną dla różnych modeli geometrycznych materiałów auksetycznych - 1D, 2D oraz 3D. Otrzymane wyniki poddano ocenie pod względem efektu auksetyczności oraz analizy naprężeń. Ponadto w ramach pracy przeprowadzono badania eksperymentalne próbki materiału auksetycznego, które zostały wykonane w technologi druku 3D z materiału Ninjaflex. W badaniach eksperymentalnych rejestrowano odpowiednie składowe odkształceń za pomocą wideoekstensometrów w celu wyznaczenia współczynnika Poissona.
Oprócz przeprowadzonej w pracy obszernej ilości analiz numerycznych oraz przeprowadzonego badania doświadczalnego w ramach pracy zaprojektowano i wykonano specjalistyczne uchwyty do próbek dla materiałów auksetycznych.
Wykonał: mgr inż. Grzegorz Ozimek
Kierunek studiów: Automatyka i Robotyka
Specjalność: Modelowanie Komputerowe Układów i Procesów (AB3)
Promotor: dr hab. inż. Witold Beluch
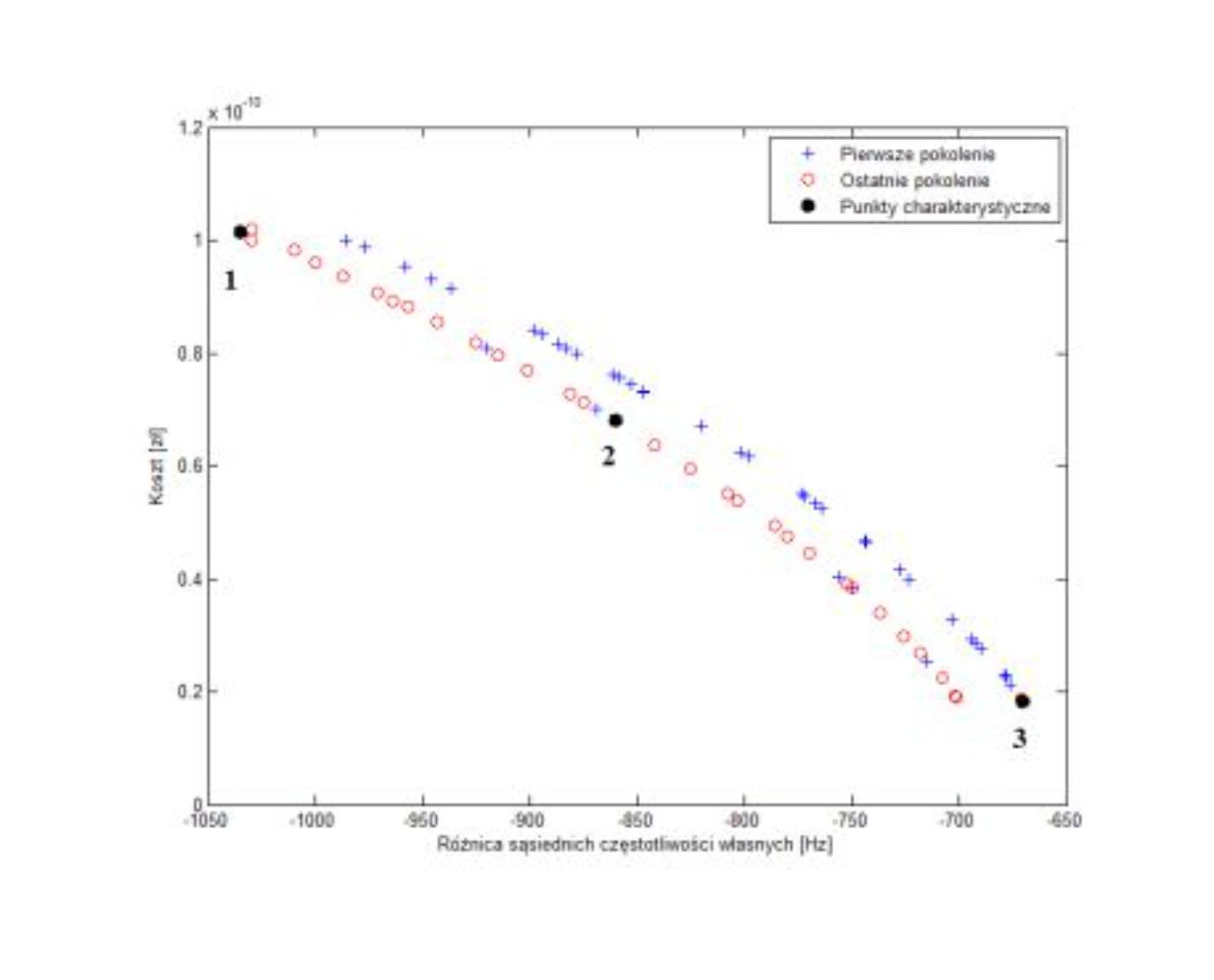
Celem pracy było odnalezienie optymalnej wartości udziału procentowego wzmocnienia dla materiału kompozytowego (budowa w skali mikro) dla wybranych kryteriów przyjętych w skali makro. W celu rozwiązania zadania połączono następujące techniki:
homogenizację numeryczną z zastosowaniem reprezentatywnego elementu objętościowego (ang. Representative Volume Element, RVE) – Rys. 1.;
metodę elementów skończonych (komercyjny pakiet oprogramowania);
algorytm ewolucyjny optymalizacji wielokryterialnej NSGA-II.
Opracowano interfejs programowy umożliwiający wymianę informacji pomiędzy poszczególnymi technikami.
Wykonał: mgr inż. Waldemar Mucha
Kierunek studiów: Automatyka i Robotyka
Specjalność: Modelowanie Komputerowe Układów i Procesów (AB3)
Promotor: dr hab. inż. Wacław Kuś Prof. PŚ
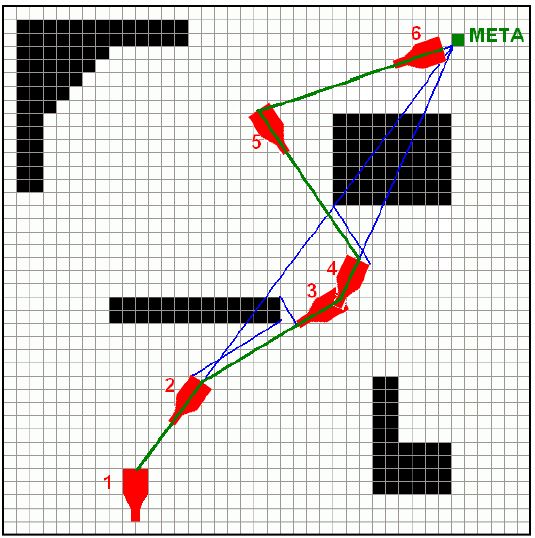
W pracy przedstawiono kompletny projekt konstrukcji mechanicznej trójkołowego robota mobilnego do celów eksploracyjnych wyposażonego w kamerę obracającą się w dwóch osiach. Wykonano szereg analiz wytrzymałościowych Metodą Elementów Skończonych: analizy ramy (statyczną, modalną oraz dynamiczną dla różnych zderzeń z przeszkodami), analizę sprzęgła oraz przekładni zębatej układu napędowego dla zablokowanego napędzanego koła. Wyniki analiz potwierdziły, że ustrój nośny robota wytrzyma wzięte pod uwagę możliwe przypadki obciążeń. Opracowano algorytm sterowania obejmujący pracę robota w trybie manualnym (w którym ruchy robota sterowane są zdalnie przez operatora) oraz pracę w trybie autonomicznym, w którym robot powinien dotrzeć do celu omijając przeszkody. Algorytm trybu autonomicznego opracowano oparty na logice klasycznej, ma on charakter poglądowy, mający na celu zademonstrować możliwość pracy samodzielnej robota wyposażonego w odpowiednie czujniki. Wykonano w pełni funkcjonalny prototyp robota w oparciu o dokumentację techniczną konstrukcji mechanicznej. Układ sterowania prototypu działa w oparciu jest o platformę Arduino i realizuje opracowane algorytmy sterowania dla trybu manualnego i autonomicznego.
Wykonał: mgr inż. Dawid Kubacki
Kierunek studiów: Automatyka i Robotyka
Specjalność: Modelowanie Komputerowe Układów i Procesów (AB3)
Promotor: dr inż. Marek Paruch
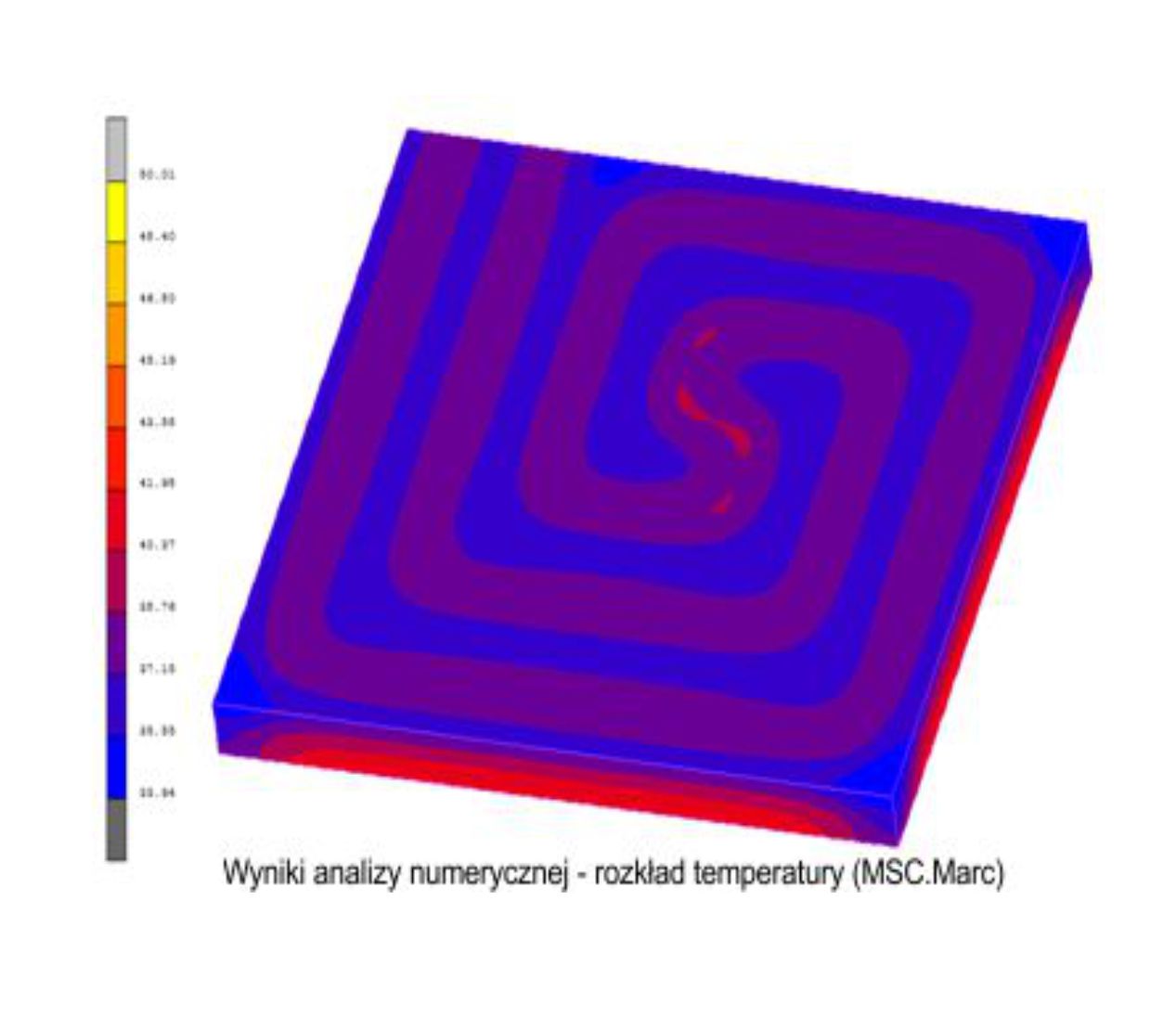
Celem pracy było wykonanie analizy numerycznej przepływu ciepła w grzejniku podłogowym. Analizie został poddany wodny grzejnik ogrzewania podłogowego, został on przeanalizowany, jako model płaski i przestrzenny. W pracy wykorzystano równania przewodzenia ciepła w stanie ustalonym i nieustalonym. Główna część analizy została wykonana w programie obliczeniowym MSC Marc/Mentat, wykorzystano także inne programy graficzne i obliczeniowe, które go wspomogły, takie jak Siemens Unigraphics NX 7.5 (przygotowanie geometrii), MSC Patran (przygotowanie siatki elementów skończonych).
Praca zdobyła II miejsce w konkursie Polskiego Towarzystwa Mechaniki Teoretycznej i Stosowanej na najlepszą pracę magisterską z mechaniki w roku 2012.
© Politechnika Śląska
Całkowitą odpowiedzialność za poprawność, aktualność i zgodność z przepisami prawa materiałów publikowanych za pośrednictwem serwisu internetowego Politechniki Śląskiej ponoszą ich autorzy - jednostki organizacyjne, w których materiały informacyjne wytworzono. Prowadzenie: Centrum Informatyczne Politechniki Śląskiej (www@polsl.pl)
„E-Politechnika Śląska - utworzenie platformy elektronicznych usług publicznych Politechniki Śląskiej”