Grupa studentów w składzie: Dominik Ambroziak, Paweł Kuczera, Kamil Mulorz, Paweł Radaczyński, Aleksander Trzewiczek, Marek Wycisło; zakończyła realizację projektu PBL pt. „Autonomiczna platforma krocząca” realizowanego w ramach programu Inicjatywa Doskonałości – Uczelnia Badawcza. Prace były realizowane w Katedrze Mechaniki Teoretycznej i Stosowanej pod opieką dr inż. Pawła Jureczko i dr inż. Pawła Bachorza.
Głównym celem prac było zaprojektowanie, wykonanie i zaprogramowanie robota kroczącego. Przewidziano możliwość sterowania zdalnego urządzeniem jak i jego pracę w trybie autonomicznym.
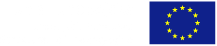
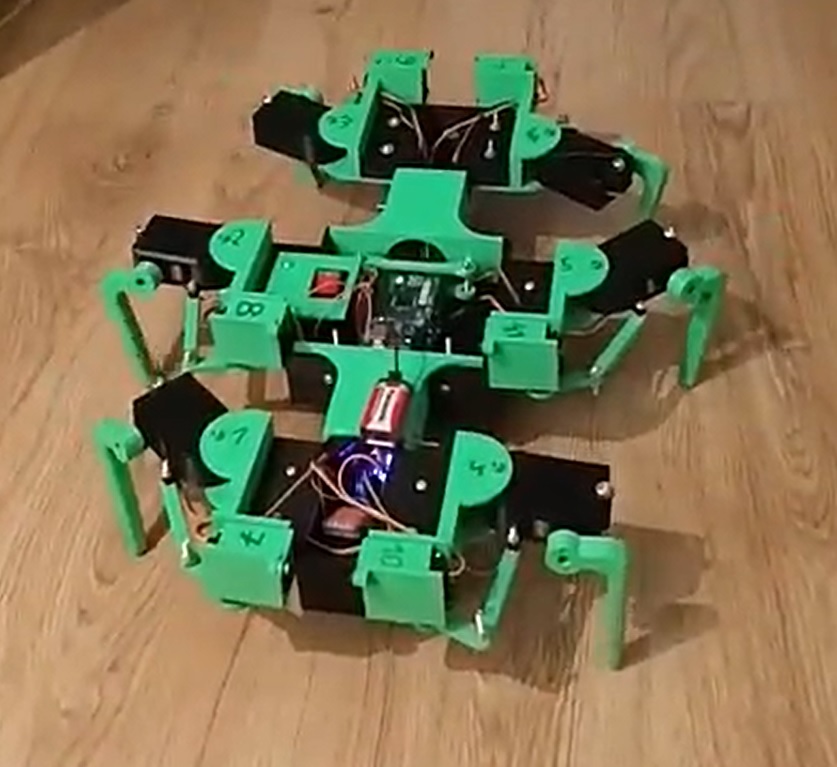
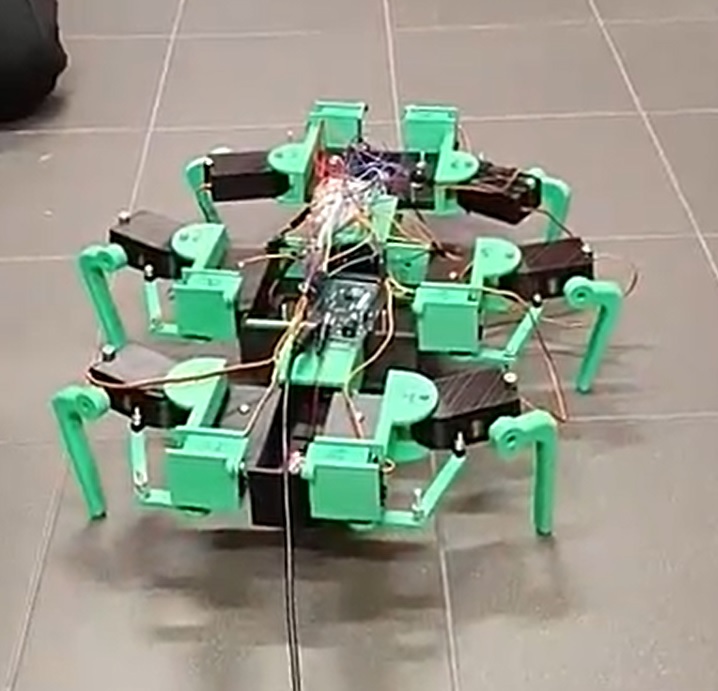
Przyjęto konstrukcję robota sześcionożnego. Układ i budowę nóg wzorowano na owadach, przyjęto 3 pary nóg równoległych o budowie umożliwiającej obniżenie środka ciężkości robota, przez to poprawiających jego stabilność. Konstrukcję robota wykonano przy użyciu technik przyrostowych. Za ruch nóg odpowiada 12 serwomechanizmów (po 2 na nogę). Za podstawę układu sterowania posłużył mikrokomputer Arduino Mega. Pozwala on na ruch autonomiczny robota jak i na kontrolę ruchu za pomocą pilota.