Przedmiotem projektu "Robot mobilny – snajper" jest:
opracowanie robota jeżdżącego z kołami typu mecanum (koła z rolkami skośnymi) wyposażonego w marker (paintball) zamontowany na ruchomej wieżyczce tj. dwu osiowym manipulatorze robota. Pojazd wyposażony zostanie w kamerę w paśmie widzialnymi i termowizyjnym ze zdalnym cyfrowym przekazem obrazu, co pozwoli na zdalne prowadzenie ostrzału z robota jeżdżącego.
Robot ten łączy zalety robota mobilnego, działka z markerem i drona dla uzyskania unikalnego zestawu cech predysponujących go do wykorzystania w warunkach wymagających efektywnej detekcji i lokalizacji celu oraz automatycznego i skutecznego „oznaczenia” celu markerem.
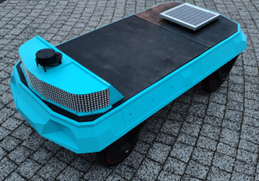
Istotne jest, że w projekcie w znacznej mierze wykorzystane zostaną podsystemy będące w dyspozycji opiekunów projektu w tym robot mobilny 4WD (platforma jeżdżąca), kamera w paśmie widzialnym i termowizyjnym z cyfrowym przekazem obrazu CGEOT (pozyskana z drona, który nie jest już zdatny do lotu). Projekt ten bazuje na doświadczeniach i efektach prac wcześniejszych projektów PBL w tym projektu budowy robota jeżdżącego (rys. 1), projekt budowy drona do sadzenia roślin (rys. 2), projektu dronów wyścigowych (rys. 3), projektu budowy semafora z elementami AI (rys. 4) i innych projektach.